Model-free policy evaluation(control)은 다음의 상황에서 유용하다.
- MDP 모델이 안알려졌지만, MDP로부터 trajectory sampling이 되는 경우
- MDP 모델은 알려졌으나, value function 계산이 infeasible한 경우
5.1 Generalized Policy Iteration
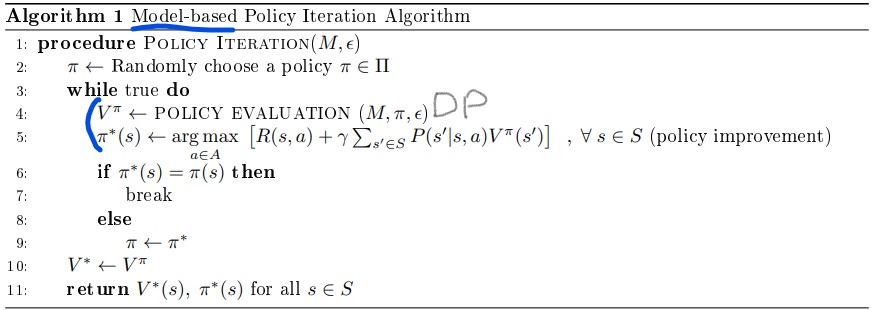
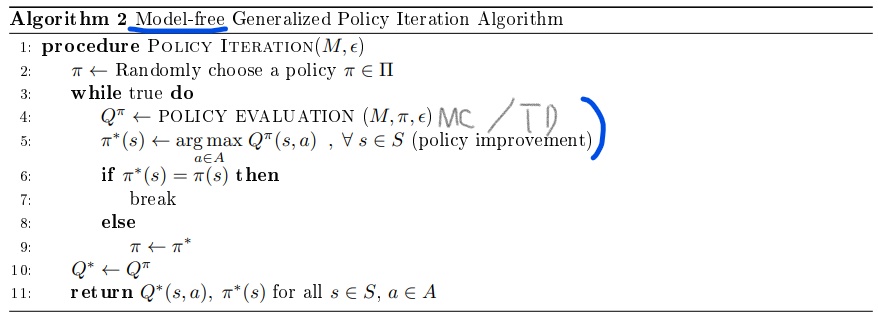
Model-based는 직접적으로 policy를 업데이트하는 꼴이고 Model-free는 Q-function에 기반해서 업데이트한다.
Model-free의 경우 주의할 점은 policy $\pi$는 어떤 action이든 선택할 확률이 있긴 해야 $Q^\pi(s,a)$를 정의할 수 있다.
5.2 Importance of Exploration
5.2.1 Exploration
Policy $\pi$는 어디든 갈 확률이 있어야 Q-value를 구할 수 있다.
5.2.2 $\epsilon$-greedy policy
현재의 Q-value estimate에 대해 exploration(suboptimal)과 exploitation(greedy) 사이를 조절해야한다.
가장 단순한 방법은 random action을 취할 확률 $\epsilon$과 greedy action을 취할 확률 $1-\epsilon$을 주는 것이다.
5.2.3 Monotonic $\epsilon$-greedy Policy Improvement
Theorem 5.1 (Monotonic $\epsilon$-greedy Policy Improvement)
Let $\pi_i$ be an $\epsilon$-greedy policy.
Let $\pi_{i+1}$ be the $\epsilon$-greedy policy w.r.t. $Q^{\pi_i}$
$\pi_{i+1}$ is a monotonic improvement on policy $\pi_i$; $V^{\pi_{i+1}} \geq V^{\pi_{i}}$
(증명)
그리고, policy improvement theorem이 말하길 $Q^{\pi_{i}}\left(s, \pi_{i+1}(s)\right) \geq V^{\pi_{i}}(s)$는 $V^{\pi_{i+1}}(s) \geq V^{\pi_{i}}(s)$를 의미한다.
5.2.3 Greedy in the limit of exploration
Convergence를 보장하기 위해 naive한 $\epsilon$-greedy policy를 좀 더 정제해보자.
Definition 5.1 (Greedy in the Limit of Infinite Exploration (GLIE)).
Policy $\pi$ is GLIE if
All state-action pairs are visited an infinite times;
즉, $i$번째 episode까지의 $(s,a)$ 방문수를 $N_i(s,a)$라고 하면, $\lim _{i \rightarrow \infty} N_{i}(s, a) \rightarrow \infty$
The behavior policy converges to the greedy policy w.r.t. the learned Q-function $q(s,a)$;
$\lim _{i \rightarrow \infty} \pi_{i}(a \mid s)=\arg \max _{a} q(s, a) \text { with probability } 1$
GLIE를 만족하는 greedy policy의 대표적인 예시는 $\epsilon_i = \frac{1}{i}$로 두는 것이다.
5.3 Monte Carlo Control
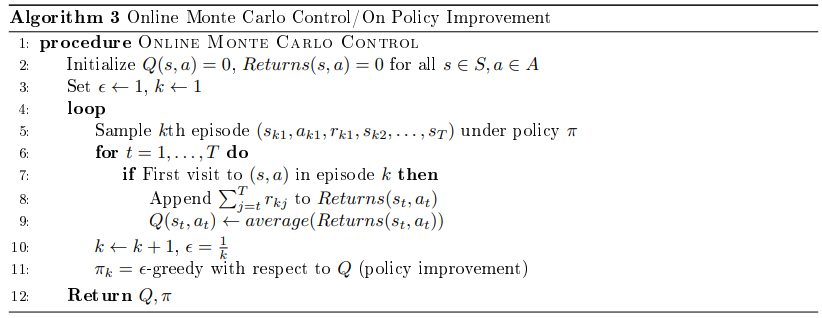
Theorem 5.2
알고리즘 3의 $\epsilon$-greedy policy가 GLIE면 optimal Q-function으로 수렴이 보장된다. $Q(s, a) \rightarrow q(s, a)$
5.4 Temporal Difference Methods for Control
TD-style model-free control은 on-policy와 off-policy가 있다.
SARSA는 Q-value를 update하는데 $(s,a,r, s’, a’)$을 사용한다.
이는 on-policy 알고리즘으로 $s\rightarrow a$와 $s’\rightarrow a’$이 똑같은 policy를 따른다.
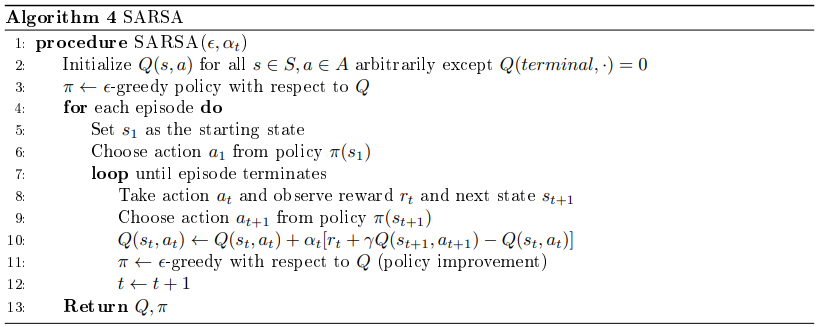
MC처럼 SARSA의 수렴은 extra condition에 의해 만족될 수 있다.
Theorem 5.3
SARSA for finite-state and finite-action MDP converges to optimal action-value $Q(s, a) \rightarrow q(s, a)$ if
- The sequence of policies $\pi$ is GLIE
- Step-size $\alpha_t$ satisfies Robin-Munro sequence $\begin{array}{l}
\sum_{t=1}^{\infty} \alpha_{t}=\infty \\
\sum_{t=1}^{\infty} \alpha_{t}^{2}<\infty
\end{array}$
5.5 Importance sampling for off-policy TD
TD policy evaluation은 $V(s) \leftarrow V(s)+\alpha\left(r+\gamma V\left(s^{\prime}\right)-V(s)\right)$으로 이뤄진다.
만약 estimate policy $\pi_e$와 behavior policy $\pi_b$가 다른 경우,
MC method로 이를 하려면 importance weight을 history의 길이만큼 곱해야 때문에 분산이 크다.
TD method의 경우 one step이라 importance weight을 한번만 곱해서 구하고 분산이 작다.
5.6 Q-learning
SARSA가 $s \rightarrow a$와 $s’\rightarrow a’$의 policy가 같다는 sense에서 on-policy라고 하였다.
이게 다르다는 sense에서 off-policy 알고리즘인 Q-learning을 소개하겠다.
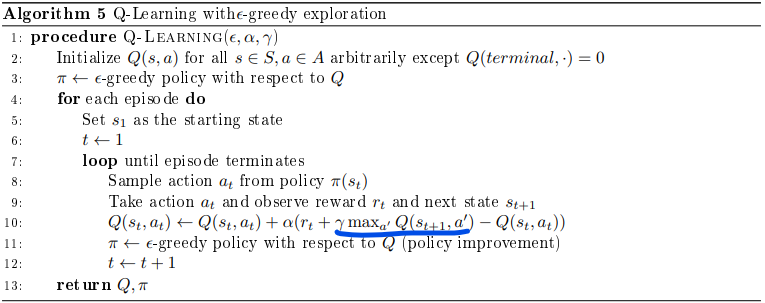
이는 TD error $r_{t}+\gamma Q\left(s_{t+1}, a_{t+1}\right)$을 $r_{t}+\gamma \max _{a^{\prime}} Q\left(s_{t+1}, a^{\prime}\right)$로 대체한 것이다.
next state $s’$에서, 현재 policy에 기반해서 next action $a’$이 나오는 게 아니라 현재 $Q$에 maximization으로 나온다.
6 Maximization Bias
6.1 Examples: Coins
두개의 identical fair coin이 있는데 아무것도 모르는 상황이다.
앞면이면 +1 뒷면이면 -1의 reward가 발생한다고 하자.
Q1. 어떤 코인이 돈을 더 벌어다줄까?
Q2. Q1에서 말한 코인은 얼마나 줄까?
이 질문에 대한 답을 위해 두개의 동전을 던지고 잘나온 동전을 골라서 답을 한다면 Q2에 대한 답은 $\frac{3}{4} \times(1)+\frac{1}{4} \times(-1)=0.5$이다.
이런 문제는 두 선택지 중에 결과가 더 나은걸 골라서 estimate하는 경우에 발생한다.
이를 피하기 위해선 더 나은 코인을 선택한 다음에 한번 더 던져서 Q2를 답해야 한다.
6.2 Maximization Bias in Reinforcement Learning
Coins의 예시에 맞춰서 One-step MDP with $\left\{\begin{array}{l}
\text{two actions } a_1, a_2\\
R(s, a_1) = R(s, a_2)=0
\end{array}\right.$을 고려해보자.
이 경우엔, $Q(s, a_1) = Q(s, a_2) = V(s) = 0$이다.
샘플링을 통해 Q에 대한 estimator를 $\hat Q (s, a_1), \hat Q(s, a_2)$라고 하자. 이들은 unbiased estimator이다.
Let $\hat \pi = \arg \max _a \hat Q(s, a)$. Then,
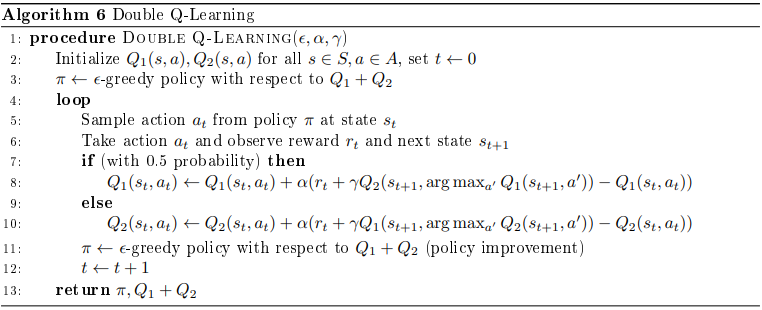
6.3 Double Q-Learning
max와 estimate을 구분해놓음으로 bias를 제거할 수 있다.
Double Q-Learning의 핵심은 $Q_1$과 $Q_2$중에 랜덤하게 하나는 max에 사용하고 하나는 estimate에 사용하는 것이다.